Abstract
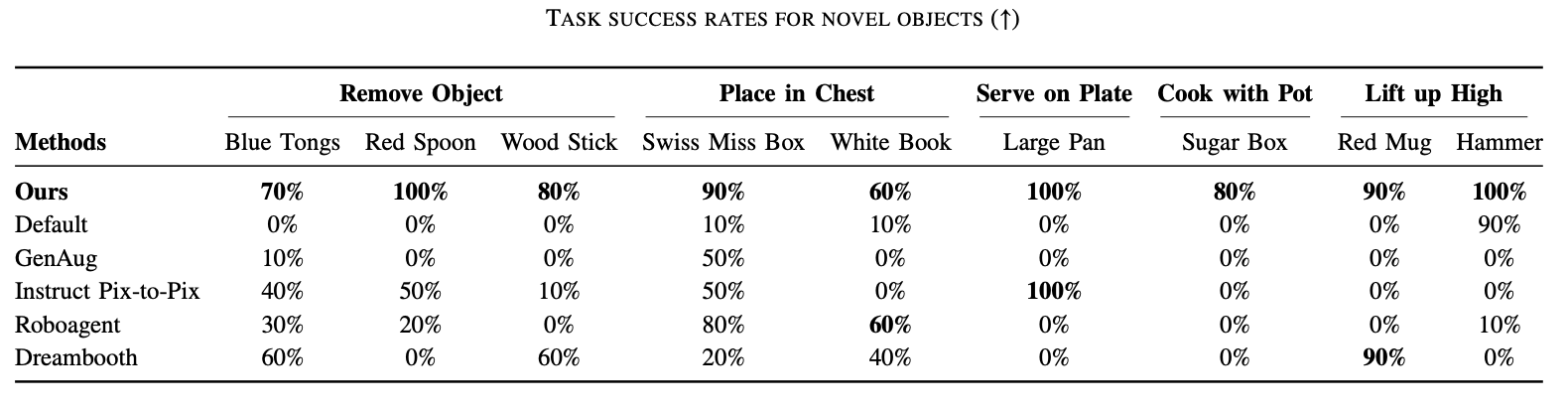
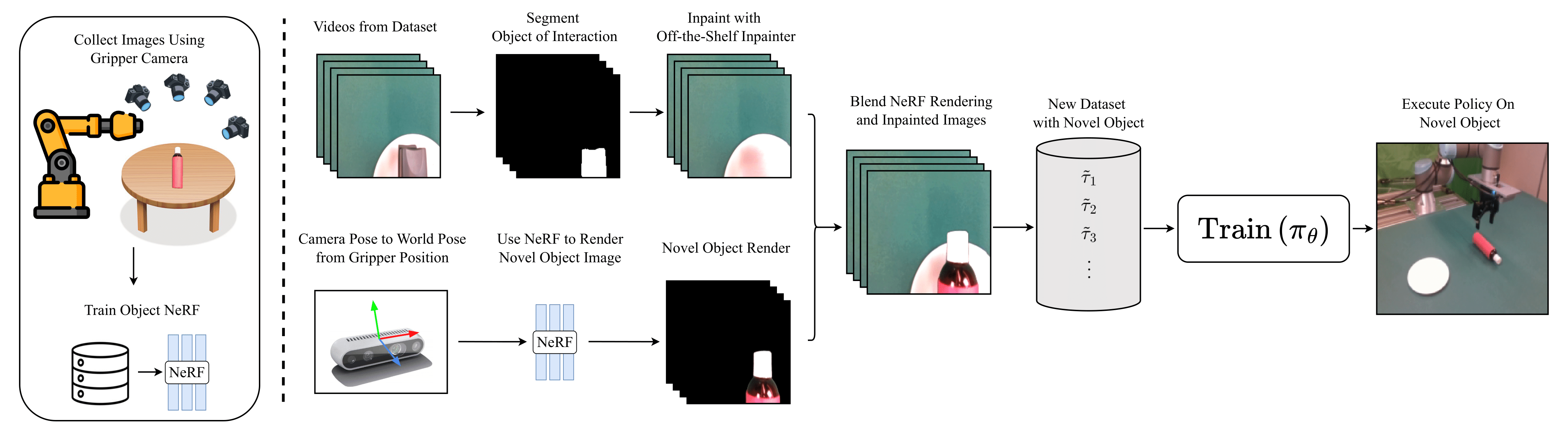
Training a policy that can generalize to unknown objects is a long standing challenge within the field of robotics. The performance of a policy often drops significantly in situations where an object in the scene was not seen during training. To solve this problem, we present NeRF-Aug, a novel method that is capable of teaching a policy to interact with objects that are not present in the dataset. This approach differs from existing approaches by leveraging the speed, photorealism, and 3D consistency of a neural radiance field for augmentation. NeRF-Aug both creates more photorealistic data and runs 63% faster than existing methods. We demonstrate the effectiveness of our method on 5 tasks with 9 novel objects that are not present in the expert demonstrations. We achieve an average performance boost of 55.6% when comparing our method to the next best method.
Overview
List of Objects Used in Experiments
Novel Objects On Left, Original Objects On Right

NeRF-Aug Before (Left) and After (Right)
Trials on Novel Objects
Put "Swiss Miss Box" in Chest
Remove "Red Spatula" from Pan
Cook With Pot Using "Sugar Box"
Results